C++如何调用opencv完成运动目标捕捉详解
目录
- 一、原理说明:
- 二、过程详解:
- 总结
使用编译器:Qt Creator 4.2.1
一、原理说明:
差帧识别原理:将这一帧的图像和上一帧的图像进行比对,产生变化的即为运动的目标像素块
二、过程详解:
1.将传入的两帧先进行灰度处理,转化将rgb类型图片转化为灰度图,可大大降低处理时间和资源消耗
将转换后的图片转存至frontGray和afterGray
cvtColor(frontFrame,frontGray,CV_BGR2GRAY);
cvtColor(afterFrame,afterGray,CV_BGR2GRAY);
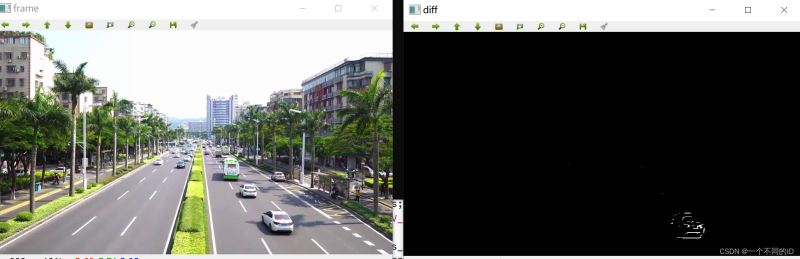
2.将两帧图片进行差帧处理
将有差别的像素转存至diff
//帧差处理 找到两帧之间运动物体差异
//缺点:会捕捉所有运动的物体,没办法专门捕捉某个目标
absdiff(frontGray,afterGray,diff);
效果如下:

3.将图像二值化,只有黑和白,便于计算机计算,但是会产生噪点(后续会进行简单的降噪操作)
//二值化: 使其变得更加黑白分明,便于计算,会产生噪点
threshold(diff,diff,25,255,CV_THRESH_BINARY);
效果如下:

一个个单独的小白点就是噪点,是因为光线反光和树叶的晃动
4.腐蚀处理,腐蚀掉<x*x方块大小的像素,我这里设置了4*4,清除大部分噪点
//腐蚀处理:去除大部分的白色噪点
Mat element = cv::getStructuringElement(MORPH_RECT,Size(4,4));
//小于4*4方块的白色噪点都会被腐蚀
erode(diff,diff,element);
效果如下,噪点确实少了很多,但是运动的物体也被腐蚀掉了很多,可能会出现漏掉运动物体的情况
可以发现,噪点几乎没有了,但是车辆的像素也被腐蚀了
5. 膨胀处理,把去除过噪点的像素图像膨胀,变大,我这里膨胀了30*30
//膨胀处理:将白色区域变"胖",便于识别
Mat element2=cv::getStructuringElement(MORPH_RECT,Size(30,30));
dilate(diff,diff,element2);
效果如下:

小像素变成“大果粒”了
6.将变动过的像素目标打上标记(注意要在原帧上进行标记)
//动态物体标记
vector<vector<Point>>contours;//用于保存关键点
findContours(diff,contours,CV_RETR_EXTERNAL,CV_CHAIN_APPROX_SIMPLE,Point(0,0));
//提取关键点
vector<vector<Point>>contours_poly(contours.size());
vector<Rect>boundRect(contours.size());
int x,y,w,h;
int num=contours.size();
for(int i=0;i<num;i++)
{
approxPolyDP(Mat(contours[i]),contours_poly[i],3,true);
boundRect[i]=boundingRect(Mat(contours_poly[i]));
x=boundRect[i].x;
y=boundRect[i].y;
w=boundRect[i].width;
h=boundRect[i].height;
//绘制
rectangle(resFrame,Point(x,y),Point(x+w,y+h),Scalar(0,255,0),2);
}
效果如下:


实际效果,偶尔有树叶飘动会产生一点点干扰
三、代码
#include <iostream>
#include <opencv2/opencv.hpp>
using namespace cv;
using namespace std;
Mat moveCheck(Mat &frontFrame,Mat &afterFrame)
{
Mat frontGray,afterGray,diff;
Mat resFrame=afterFrame.clone();
//灰度处理,节省运算时间
cvtColor(frontFrame,frontGray,CV_BGR2GRAY);
cvtColor(afterFrame,afterGray,CV_BGR2GRAY);
//帧差处理 找到两帧之间运动物体差异
//缺点:会捕捉所有运动的物体,没办法专门捕捉某个目标
absdiff(frontGray,afterGray,diff);
//二值化: 使其变得更加黑白分明,便于计算,会产生噪点
threshold(diff,diff,25,255,CV_THRESH_BINARY);
//腐蚀处理:去除大部分的白色噪点
Mat element = cv::getStructuringElement(MORPH_RECT,Size(4,4));//小于4*4方块的白色噪点都会被腐蚀
erode(diff,diff,element);
//膨胀处理:将白色区域变"胖",便于识别
Mat element2=cv::getStructuringElement(MORPH_RECT,Size(30,30));
dilate(diff,diff,element2);
//动态物体标记
vector<vector<Point>>contours;//用于保存关键点
findContours(diff,contours,CV_RETR_EXTERNAL,CV_CHAIN_APPROX_SIMPLE,Point(0,0));
//提取关键点
vector<vector<Point>>contours_poly(contours.size());
vector<Rect>boundRect(contours.size());
int x,y,w,h;
int num=contours.size();
for(int i=0;i<num;i++)
{
approxPolyDP(Mat(contours[i]),contours_poly[i],3,true);
boundRect[i]=boundingRect(Mat(contours_poly[i]));
x=boundRect[i].x;
y=boundRect[i].y;
w=boundRect[i].width;
h=boundRect[i].height;
//绘制
rectangle(resFrame,Point(x,y),Point(x+w,y+h),Scalar(0,255,0),2);
}
return resFrame;
}
int main(int argc, char *argv[])
{
Mat frame;
Mat temp;
Mat res;
int num=0;
VideoCapture cap("D:/VideoTraining/carMove.mp4");
while (cap.read(frame))
{
num++;
if(num==1)
{//如果为第一帧则把当前帧传入(即不产生效果)
res=moveCheck(frame,frame);
}
else
{//从第二帧开始才有差帧
res=moveCheck(temp,frame);
}
temp=frame.clone();//此处注意要调用.clone深拷贝,否则会出现两个画面一样的情况
imshow("frame",frame);
imshow("res",res);
waitKey(25);
}
return 0;
}
QT下配置opencv可以看看这一篇:
Qt下配置opencv环境
识别特定目标可以看看这一篇:
C++使用opencv调用级联分类器来识别目标物体
总结
到此这篇关于C++如何调用opencv完成运动目标捕捉的文章就介绍到这了,更多相关C++ opencv运动目标捕捉内容请搜索我们以前的文章或继续浏览下面的相关文章希望大家以后多多支持我们!
相关推荐
-

Python+OpenCV目标跟踪实现基本的运动检测
目标跟踪是对摄像头视频中的移动目标进行定位的过程,有着非常广泛的应用.实时目标跟踪是许多计算机视觉应用的重要任务,如监控.基于感知的用户界面.增强现实.基于对象的视频压缩以及辅助驾驶等. 有很多实现视频目标跟踪的方法,当跟踪所有移动目标时,帧之间的差异会变的有用:当跟踪视频中移动的手时,基于皮肤颜色的均值漂移方法是最好的解决方案:当知道跟踪对象的一方面时,模板匹配是不错的技术. 本文代码是做一个基本的运动检测 考虑的是"背景帧"与其它帧之间的差异 这种方法检测结果还是挺不错的,但是需要
-
Opencv二帧差法检测运动目标与提取轮廓
Opencv学习之二帧差法运动目标检测与轮廓提取 ,供大家参考,具体内容如下 代码是从网上摘抄学习的,加了好多注释,感觉就像边看书边做笔记一样,给人以满足的享受.Let's do this! #include "highgui.h" #include "cv.h" #include "stdio.h" #include <time.h> #include <math.h> #include <string.h>
-
OpenCV实现帧差法检测运动目标
今天的目标是用OpenCV实现对运动目标的检测,这里选用三帧帧差法.代码如下: #include <opencv2/opencv.hpp> #include <cv.h> #include <highgui.h> #include <stdio.h> #include <ctype.h> double Threshold_index=0; const int CONTOUR_MAX_AERA = 200; void trackbar(int po
-
C++如何调用opencv完成运动目标捕捉详解
目录 一.原理说明: 二.过程详解: 总结 使用编译器:Qt Creator 4.2.1 一.原理说明: 差帧识别原理:将这一帧的图像和上一帧的图像进行比对,产生变化的即为运动的目标像素块 二.过程详解: 1.将传入的两帧先进行灰度处理,转化将rgb类型图片转化为灰度图,可大大降低处理时间和资源消耗 将转换后的图片转存至frontGray和afterGray cvtColor(frontFrame,frontGray,CV_BGR2GRAY); cvtColor(afterFrame,after
-
python OpenCV 实现高斯滤波详解
目录 一.高斯滤波 二.C++代码 三.python代码 四.结果展示 1.原始图像 2.5x5卷积 3.9x9卷积 一.高斯滤波 高斯滤波是一种线性平滑滤波,适用于消除高斯噪声,广泛应用于图像处理的减噪过程. [1] 通俗的讲,高斯滤波就是对整幅图像进行加权平均的过程,每一个像素点的值,都由其本身和邻域内的其他像素值经过加权平均后得到.高斯滤波的具体操作是:用一个模板(或称卷积.掩模)扫描图像中的每一个像素,用模板确定的邻域内像素的加权平均灰度值去替代模板中心像素点的值. 二.C++代码
-
Python OpenCV机器学习之图像识别详解
目录 背景 一.人脸识别 二.车牌识别 三.DNN图像分类 背景 OpenCV中也提供了一些机器学习的方法,例如DNN:本篇将简单介绍一下机器学习的一些应用,对比传统和前沿的算法,能从其中看出优劣: 一.人脸识别 主要有以下两种实现方法: 1.哈尔(Haar)级联法:专门解决人脸识别而推出的传统算法: 实现步骤: 创建Haar级联器: 导入图片并将其灰度化: 调用函数接口进行人脸识别: 函数原型: detectMultiScale(img,scaleFactor,minNeighbors) sc
-
Python OpenCV绘制各类几何图形详解
目录 一.绘制直线 二.绘制矩形 三.绘制圆形 四.绘制椭圆 五.绘制多边形 六.绘制文字 七.总结 一.绘制直线 在OpenCV中,绘制直线需要获取直线的起点和终点坐标,调用cv2.line()函数实现该功能.该函数原型如下所示: img = line(img, pt1, pt2, color[, thickness[, lineType[, shift]]]) – img表示需要绘制的那幅图像 – pt1表示线段第一个点的坐标 – pt2表示线段第二个点的坐标 – color表示线条颜色,需
-
Python+OpenCV绘制灰度直方图详解
1.直方图的概念 图像直方图是反映一个图像像素分布的统计表,其实横坐标代表了图像像素的种类,可以是灰度的,也可以是彩色的.纵坐标代表了每一种颜色值在图像中的像素总数或者占所有像素个数的百分比.图像是由像素构成,因为反映像素分布的直方图往往可以作为图像一个很重要的特征. 图像灰度直方图: 一幅图像由不同灰度值的像素组成,图像中灰度的分布情况是该图像的一个重要特征.图像的灰度直方图就描述了图像中灰度分布情况,能够很直观的展示出图像中各个灰度级所占的多少.图像的灰度直方图是灰度级的函数,描述的是图像中
-
C++调用Python基础功能实例详解
c++调用Python首先安装Python,以win7为例,Python路径为:c:\Python35\,通过mingw编译c++代码. 编写makefile文件,首先要添加包含路径: inc_path += c:/Python35/include 然后添加链接参数: ld_flag += c:/Python35/libs/libpython35.a 在源文件中添加头文件引用: #include "Python.h" Python解释器需要进行初始化,完成任务后需要终止: void s
-
对YOLOv3模型调用时候的python接口详解
需要注意的是:更改完源程序.c文件,需要对整个项目重新编译.make install,对已经生成的文件进行更新,类似于之前VS中在一个类中增加新函数重新编译封装dll,而python接口的调用主要使用的是libdarknet.so文件,其余在配置文件中的修改不必重新进行编译安装. 之前训练好的模型,在模型调用的时候,总是在 lib = CDLL("/home/*****/*******/darknet/libdarknet.so", RTLD_GLOBAL)这里读不到darknet编译
-
对python调用RPC接口的实例详解
要调用RPC接口,python提供了一个框架grpc,这是google开源的 rpc相关文档: https://grpc.io/docs/tutorials/basic/python.html 需要安装的python包如下: 1.grpc安装 pip install grpcio 2.grpc的python protobuf相关的编译工具 pip install grpcio-tools 3.protobuf相关python依赖库 pip install protobuf 4.一些常见原型的生成
-
PHP封装curl的调用接口及常用函数详解
如下所示: <?php /** * @desc 封装curl的调用接口,post的请求方式 */ function doCurlPostRequest($url, $requestString, $timeout = 5) { if($url == "" || $requestString == "" || $timeout <= 0){ return false; } $con = curl_init((string)$url); curl_setop
-
使用C++调用Python代码的方法详解
一.配置python环境问题 1.首先安装Python(版本无所谓),安装的时候选的添加python路径到环境变量中 安装之后的文件夹如下所示: 2.在VS中配置环境和库 右击项目->属性->VC++目录 1)包含目录: Python安装路径/include 2)库目录: Python安装路径/libs 右击项目->属性->连接器->输入->附加依赖库 debug下: python安装目录/libs/python37_d.lib release下: python安装目录