python利用opencv实现颜色检测
本文实例为大家分享了python利用opencv实现颜色检测的具体代码,供大家参考,具体内容如下
需要实现倒车辅助标记检测的功能,倒车辅助标记颜色已经确定了,所以不需要使用深度学习的方法,那样成本太高了,直接可以使用颜色检测的方法。
1.首先需要确定待检测目标的HSV值
import cv2
img = cv2.imread('l3.png')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
hsv = cv2.cvtColor(img, cv2.COLOR_BGR2HSV)
def mouse_click(event, x, y, flags, para):
if event == cv2.EVENT_LBUTTONDOWN: # 左边鼠标点击
print('PIX:', x, y)
print("BGR:", img[y, x])
print("GRAY:", gray[y, x])
print("HSV:", hsv[y, x])
if __name__ == '__main__':
cv2.namedWindow("img")
cv2.setMouseCallback("img", mouse_click)
while True:
cv2.imshow('img', img)
if cv2.waitKey() == ord('q'):
break
cv2.destroyAllWindows()
2.然后利用颜色检测,检测出指定目标
import numpy as np
import cv2
font = cv2.FONT_HERSHEY_SIMPLEX
lower_red = np.array([0, 127, 128]) # 红色阈值下界
higher_red = np.array([10, 255, 255]) # 红色阈值上界
lower_yellow = np.array([15, 230, 230]) # 黄色阈值下界
higher_yellow = np.array([35, 255, 255]) # 黄色阈值上界
lower_blue = np.array([85,240,140])
higher_blue = np.array([100,255,165])
frame=cv2.imread("l3.png")
img_hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
mask_red = cv2.inRange(img_hsv, lower_red, higher_red) # 可以认为是过滤出红色部分,获得红色的掩膜
mask_yellow = cv2.inRange(img_hsv, lower_yellow, higher_yellow) # 获得绿色部分掩膜
mask_yellow = cv2.medianBlur(mask_yellow, 7) # 中值滤波
mask_red = cv2.medianBlur(mask_red, 7) # 中值滤波
mask_blue = cv2.inRange(img_hsv, lower_blue, higher_blue) # 获得绿色部分掩膜
mask_blue = cv2.medianBlur(mask_blue, 7) # 中值滤波
#mask = cv2.bitwise_or(mask_green, mask_red) # 三部分掩膜进行按位或运算
print(mask_red)
cnts1, hierarchy1 = cv2.findContours(mask_red, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE) # 轮廓检测 #红色
cnts2, hierarchy2 = cv2.findContours(mask_blue, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE) # 轮廓检测 #红色
cnts3, hierarchy3 = cv2.findContours(mask_yellow, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)
for cnt in cnts1:
(x, y, w, h) = cv2.boundingRect(cnt) # 该函数返回矩阵四个点
cv2.rectangle(frame, (x, y), (x + w, y + h), (0, 0, 255), 2) # 将检测到的颜色框起来
cv2.putText(frame, 'red', (x, y - 5), font, 0.7, (0, 0, 255), 2)
for cnt in cnts2:
(x, y, w, h) = cv2.boundingRect(cnt) # 该函数返回矩阵四个点
cv2.rectangle(frame, (x, y), (x + w, y + h), (0, 0, 255), 2) # 将检测到的颜色框起来
cv2.putText(frame, 'blue', (x, y - 5), font, 0.7, (0, 0, 255), 2)
for cnt in cnts3:
(x, y, w, h) = cv2.boundingRect(cnt) # 该函数返回矩阵四个点
cv2.rectangle(frame, (x, y), (x + w, y + h), (0, 255, 0), 2) # 将检测到的颜色框起来
cv2.putText(frame, 'yellow', (x, y - 5), font, 0.7, (0, 255, 0), 2)
cv2.imshow('frame', frame)
cv2.waitKey(0)
cv2.destroyAllWindows()
3.效果
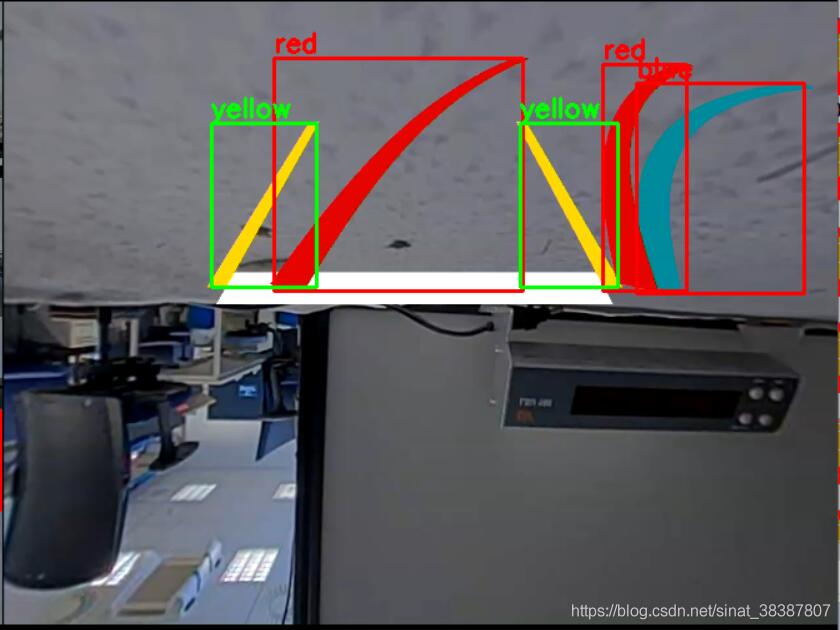
以上就是本文的全部内容,希望对大家的学习有所帮助,也希望大家多多支持我们。
相关推荐
-

python opencv根据颜色进行目标检测的方法示例
颜色目标检测就是根据物体的颜色快速进行目标定位.使用cv2.inRange函数设定合适的阈值,即可以选出合适的目标. 建立项目colordetect.py,代码如下: #! /usr/bin/env python # -*- coding: utf-8 -*- import numpy as np import cv2 def colorDetect(): image = cv2.imread('./1.png') # 使用RGB颜色空间检测红 蓝 黄 灰,设置合适的阈值 boundaries
-
利用python打开摄像头及颜色检测方法
最近两周由于忙于个人项目,一直未发言了,实在是太荒凉了....,上周由于项目,见到Python的应用极为广泛,用起来也特别顺手,于是小编也开始着手学习Python,-下面我就汇报下今天的学习成果吧 小编运行环境unbuntu 14.0.4 首先我们先安装一下Python呗,我用的2.7,其实特别简单,一行指令就OK sudo apt-get install python-dev 一般安装系统的时候其实python已经自带了,这步基本可以不用做,OK,我们继续往下走吧,安装python-openc
-
基于Python检测动态物体颜色过程解析
本篇文章将通过图片对比的方法检查视频中的动态物体,并将其中会动的物体定位用cv2矩形框圈出来.本次项目可用于树莓派或者单片机追踪做一些思路参考.寻找动态物体也可以用来监控是否有人进入房间等等场所的监控.不仅如此,通过对物体的像素值判断分类,达到判断动态物体总体颜色的效果. 引言 物体检测,是一种基于目的几何学和统计资料特点的影像拆分,它将目的的拆分和辨识,其准确度和实时性是整个该系统的一项最重要战斗能力.特别是在是在简单桥段中的,必须对多个目的展开实时处理时,目的系统会萃取和辨识就变得尤其最重要
-
python opencv检测目标颜色的实例讲解
实例如下所示: # -*- coding:utf-8 -*- __author__ = 'kingking' __version__ = '1.0' __date__ = '14/07/2017' import cv2 import numpy as np import time if __name__ == '__main__': Img = cv2.imread('example.png')#读入一幅图像 kernel_2 = np.ones((2,2),np.uint8)#2x2的卷积核
-
python利用opencv实现颜色检测
本文实例为大家分享了python利用opencv实现颜色检测的具体代码,供大家参考,具体内容如下 需要实现倒车辅助标记检测的功能,倒车辅助标记颜色已经确定了,所以不需要使用深度学习的方法,那样成本太高了,直接可以使用颜色检测的方法. 1.首先需要确定待检测目标的HSV值 import cv2 img = cv2.imread('l3.png') gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) hsv = cv2.cvtColor(img, cv2.COL
-
python利用opencv调用摄像头实现目标检测
目录 使用到的库 实现思路 实现代码 2020/4/26更新:FPS计算 FPS记录的原理 FPS实现代码 使用到的库 好多人都想了解一下如何对摄像头进行调用,然后进行目标检测,于是我做了这个小BLOG. opencv-python==4.1.2.30 Pillow==6.2.1 numpy==1.17.4 这些都是通用的库,版本不同问题应该也不大. 实现思路 利用opencv调用摄像头,读取每一帧传入目标检测网络检测,将检测结果呈现. 由于本文所用的检测格式为RGB格式,CV2读取的时候会使用
-
python利用Opencv实现人脸识别功能
本文实例为大家分享了python利用Opencv实现人脸识别功能的具体代码,供大家参考,具体内容如下 首先:需要在在自己本地安装opencv具体步骤可以问度娘 如果从事于开发中的话建议用第三方的人脸识别(推荐阿里) 1.视频流中进行人脸识别 # -*- coding: utf-8 -*- import cv2 import sys from PIL import Image def CatchUsbVideo(window_name, camera_idx): cv2.namedWindow(w
-
python利用opencv如何实现答题卡自动判卷
目录 1.设定答题卡模板 2.读取答题卡图像并对图像进行灰度化处理 3.高斯模糊图像去噪点 4.使用大津法二值分割图像 5.使用开运算去噪点 6.使用canny边缘检测算法 7.筛选答题区域轮廓,透视变换矫正目标区域 使用摄像头实时判卷部分 总结 1.设定答题卡模板 该图像为答题卡的答题区域,黑色边框是为了能够在各种环境中轻易的检测,左部分和上部分的黑色矩形,是为能够定位到答题选项的坐标而设置,同时题目数量为20×3共60道选择题,在进行批改试卷之前,需要手动输入该次考试的正确答案作为模板来对识
-
Python基于OpenCV实现人脸检测并保存
本文实例为大家分享了Python基于OpenCV实现人脸检测,并保存的具体代码,供大家参考,具体内容如下 安装opencv 如果安装了pip的话,Opencv的在windows的安装可以直接通过cmd命令pip install opencv-python(只需要主要模块),也可以输入命令pip install opencv-contrib-python(如果需要main模块和contrib模块) 详情可以点击此处 导入opencv import cv2 所有包都包含haarcascade文件.这
-
Python 利用OpenCV给照片换底色的示例代码
OpenCV的全称是:Open Source Computer Vision Library.OpenCV是一个基于BSD许可(开源)发行的跨平台计算机视觉库,可以运行在Linux.Windows和Mac OS操作系统上.它轻量级而且高效--由一系列 C 函数和少量 C++ 类构成,同时提供了Python.Ruby.MATLAB等语言的接口,实现了图像处理和计算机视觉方面的很多通用算法.相比于PIL库来说OpenCV更加强大, 可以做更多更复杂的应用,比如人脸识别等. 1. 读入并显示图片 im
-
Python利用OpenCV和skimage实现图像边缘检测
目录 一.简介 二.opencv 实践 三.skimage 实践 一.简介 提取图片的边缘信息是底层数字图像处理的基本任务之一.边缘信息对进一步提取高层语义信息有很大的影响.大部分边缘检测算法都是上个世纪的了,OpenCV 的使用的算法是 Canny 边缘检测算法,大概是在 1986 年由 John F. Canny 提出了,似乎说明边缘检测算法的研究已经到达了瓶颈期.跟人眼系统相比,边缘检测算法仍然逊色不少. Canny 边缘检测算法是比较出色的算法,也是一种多步算法,可用于检测任何输入图像的
-
Python 使用Opencv实现目标检测与识别的示例代码
在上章节讲述到图像特征检测与匹配 ,本章节是讲述目标检测与识别.后者是在前者的基础上进一步完善. 在本章中,我们使用HOG算法,HOG和SIFT.SURF同属一种类型的描述符.功能代码如下: import cv2 def is_inside(o, i): ox, oy, ow, oh = o ix, iy, iw, ih = i # 如果符合条件,返回True,否则返回False return ox > ix and oy > iy and ox + ow < ix + iw and o
-
python利用opencv保存、播放视频
代码已上传至:https://gitee.com/tqbx/python-opencv/tree/master/Getting_started_videos 目标 学习读取视频,播放视频,保存视频. 学习从相机中捕捉帧并展示. 学习cv2.VideoCapture(),cv2.VideoWriter()的使用 从相机中捕捉视频 通过自带摄像头捕捉视频,并将其转化为灰度视频显示出来. 基本步骤如下: 1.首先创建一个VideoCapture对象,它的参数包含两种: 设备索引,指定摄像机的编号. 视