OpenCV实现直线拟合
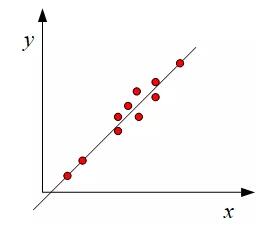
相比于直线检测,直线拟合的最大特点是将所有数据只拟合出一条直线
void fitLine( InputArray points, OutputArray line, int distType,
double param, double reps, double aeps );
- points:输入待拟合直线的2D或者3D点集。
- line:输出描述直线的参数,2D点集描述参数为Vec4f类型,3D点集描述参数为Vec6f类型。
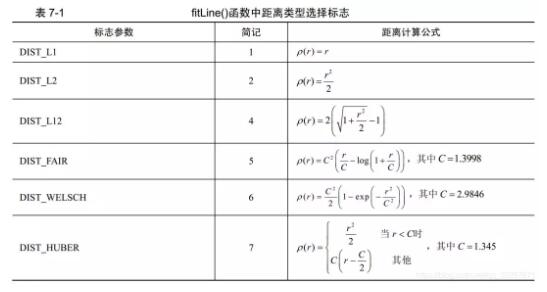
- distType:M-estimator算法使用的距离类型标志,可以选择的距离类型在表7-1中给出。
- param:某些类型距离的数值参数(C)。如果数值为0,则自动选择最佳值。
- reps:坐标原点与直线之间的距离精度,数值0表示选择自适应参数,一般常选择0.01。
- aeps:直线角度精度,数值0表示选择自适应参数,一般常选择0.01。
该函数利用最小二乘法拟合出距离所有点距离最小的直线,直线的描述形式可以转化成点斜式。函数第一个参数是待拟合直线的2D或者3D点集,可以存放在vector<>或者Mat类型的变量中赋值给参数。函数第二个参数是拟合直线的描述参数,如果是2D点集,输出量为Vec4f类型的(vx vy x0 y0),其中(vx vy)是与直线共线的归一化向量,(x0 y0)是拟合直线上的随意一点,根据这四个量可以计算得到2维平面直线的点斜式解析式,表示形式如式所示。

如果输入参数是3D点集,输出量为Vec6f类型的(vx vy vz x0 y0 z0),其中(vx vy vz)是与直线共线的归一化向量,(x0 y0 z0)是拟合直线上的随意一点。函数第三个参数是M-estimator算法使用的距离类型标志,可以选择的距离类型在表中给出。函数第四个参数是某些距离类型中的数值参数C,如果数值0表示选择最佳值。函数第五个参数表示坐标原点与拟合直线之间的距离精度,数值0表示选择自适应参数;函数第六个参数表示拟合直线的角度精度,数值0表示选择自适应参数。第五个参数和第六个参数一般取值0.01。
简单示例
//
// Created by smallflyfly on 2021/6/22.
//
#include "opencv2/opencv.hpp"
#include <iostream>
using namespace std;
using namespace cv;
int main() {
Vec4f lines;
vector<Point2f> points;
const static float pts[20][2] = {
{0.0f,0.0f},{10.0f,11.0f},{21.0f,20.0f},{30.0f,30.0f},
{40.0f,42.0f},{50.0f,50.0f},{60.0f,60.0f},{70.0f,70.0f},
{80.0f,80.0f},{90.0f,92.0f},{100.0f,100.0f},{110.0f,110.0f},
{120.f,120.0f},{136.0f,130.0f},{138.0f,140.0f},{150.0f,150.0f},
{160.0f,163.0f},{175.0f,170.0f},{181.0f,180.0f},{200.0f,190.0f}
};
for (int i = 0; i < 20; ++i) {
points.emplace_back(pts[i][0], pts[i][1]);
}
double param = 0.0;
double reps = 0.01;
double aeps = 0.01;
fitLine(points, lines, DIST_L1, param, reps, aeps);
cout << lines << endl;
return 0;
}
以上就是本文的全部内容,希望对大家的学习有所帮助,也希望大家多多支持我们。
相关推荐
-

OpenCV实现图像的直线检测
上一篇博文介绍了图像的Canny边缘检测,本文主要介绍图像的直线检测部分,主要使用概率霍夫变换来检测直线,调用的函数为HoughLinesP(),下面给出代码部分以及直线检测效果图: 1.代码部分: // Detect_Lines.cpp : 定义控制台应用程序的入口点. // #include "stdafx.h" #include <cv.h> #include "highgui.h" using namespace std; using names
-
OpenCV利用霍夫变换进行直线检测
本文实例为大家分享了OpenCV利用霍夫变换进行直线检测的具体代码,供大家参考,具体内容如下 1.最简单的霍夫变换是在图像中识别直线.在平面直角坐标系(x-y)中,一条直线可以用下式表示:y=kx+b. 这表示参数平面(k-b)中的一条直线.因此,图像中的一个点对应参数平面中的一条直线,图像中的一条直线对应参数平面中的一个点.对图像上所有的点作霍夫变换,最终所要检测的直线对应的一定是参数平面中直线相交最多的那个点.这样就在图像中检测出了直线.在实际应用中,直线通常采用参数方程:p=x\cos\t
-
OpenCV实现直线拟合
相比于直线检测,直线拟合的最大特点是将所有数据只拟合出一条直线 void fitLine( InputArray points, OutputArray line, int distType, double param, double reps, double aeps ); points:输入待拟合直线的2D或者3D点集. line:输出描述直线的参数,2D点集描述参数为Vec4f类型,3D点集描述参数为Vec6f类型. distType:M-estimator算法使用的距离类型标志,可以选择
-
C语言实现opencv提取直线、轮廓及ROI实例详解
一.Canny检测轮廓 在上一篇文章中有提到sobel边缘检测,并重写了soble的C++代码让其与matlab中算法效果一致,而soble边缘检测是基于单一阈值的,我们不能兼顾到低阈值的丰富边缘和高阈值时的边缘缺失这两个问题.而canny算子则很好的弥补了这一不足,从目前看来,canny边缘检测在做图像轮廓提取方面是最优秀的边缘检测算法. canny边缘检测采用双阈值值法,高阈值用来检测图像中重要的.显著的线条.轮廓等,而低阈值用来保证不丢失细节部分,低阈值检测出来的边缘更丰富,但是很多边缘并
-
opencv检测直线方法之投影法
本文实例为大家分享了opencv检测直线之投影法的具体代码,供大家参考,具体内容如下 以下是我对投影法的一点认识和实验: 投影法就是数字图像在某个方向上进行像素累加.通过水平和垂直方向的投影,可以得到表格图像投影的几个特点: (1)表格区域的水平与竖直投影分布通常出现周期性的尖峰 (2)在文字投影的行与行之间或列与列之间常会出现明显的空白区 因此,求图像水平以及竖直投影,根据特点分别设以阈值就可以将横线以及竖直线所在位置确定. 第一步:求图像的水平投影.竖直投影 第二步:设定合理阈值,求取大于阈
-
python opencv实现直线检测并测出倾斜角度(附源码+注释)
由于学习需要,我想要检测出图片中的直线,并且得到这些直线的角度.于是我在网上搜了好多直线检测的代码,但是没有搜到附有计算直线倾斜角度的代码,所以我花了一点时间,自己写了一份直线检测并测出倾斜角度的代码,希望能够帮助到大家! 注:这份代码只能够检测简单结构图片的直线,复杂结构的图片还需要设置合理的参数 下面展示 源码. import cv2 import numpy as np def line_detect(image): # 将图片转换为HSV hsv = cv2.cvtColor(image
-
python opencv检测直线 cv2.HoughLinesP的实现
cv2.HoughLines()函数是在二值图像中查找直线,cv2.HoughLinesP()函数可以查找直线段. cv2.HoughLinesP()函数原型: HoughLinesP(image, rho, theta, threshold, lines=None, minLineLength=None, maxLineGap=None) image: 必须是二值图像,推荐使用canny边缘检测的结果图像: rho: 线段以像素为单位的距离精度,double类型的,推荐用1.0 theta:
-
OpenCV实现直线检测并消除
本文实例为大家分享了OpenCV实现直线检测并消除的具体代码,供大家参考,具体内容如下 很简单,代码如下 #include<iostream> #include<opencv.hpp> using namespace cv; using namespace std; int main() { Mat img, dst, img_gary, img_bin, temp, r_line, c_line, kernel; char INPUT[] = "input";
-
详解在Python中使用OpenCV进行直线检测
目录 1.引言 2.霍夫变换 3.举个栗子 3.1读入图像进行灰度化 3.2执行边缘检测 3.3进行霍夫变换 补充 1. 引言 在图像处理中,直线检测是一种常见的算法,它通常获取n个边缘点的集合,并找到通过这些边缘点的直线.其中用于直线检测,最为流行的检测器是基于霍夫变换的直线检测技术. 2. 霍夫变换 霍夫变换是图像处理中的一种特征提取方法,可以识别图像中的几何形状.它将在参数空间内进行投票来决定其物体形状,通过检测累计结果找到一极大值所对应的解,利用此解即可得到一个符合特定形状的参数. 在使
-
Python OpenCV Hough直线检测算法的原理实现
目录 直线检测原理 OpenCV实现 直线检测原理 核心要点:图像坐标空间.参数空间.极坐标参数空间 -> (极坐标)参数空间表决 给定一个点,我们一般会写成y=ax+b的形式,这是坐标空间的写法:我们也可以写成b=-xa+y的形式,这是参数空间的写法.也就是说,给定一个点,那么经过该点的直线的参数必然满足b=-xa+y这一条件,也就是必然在参数空间中b=-xa+y这条直线上.如果给定两个点,那么这两点确定的唯一的直线的参数,就是参数空间中两条参数直线的交点. 由于上述写法不适合处理水平或垂直的
-
OpenCV实现直线检测
本文实例为大家分享了OpenCV实现直线检测的具体代码,供大家参考,具体内容如下 1 介绍 本文主要介绍OpenCV自带的直线检测函数HoughLines()的用法,这个函数的第一个参数是一个二值化图像,所以在进行霍夫变换之前要首先进行二值化,或者进行Canny 边缘检测.第二和第三个值分别代表β 和 θ 的精确度.第四个参数是阈值,只有累加其中的值高于阈值时才被认为是一条直线,也可以把它看成能检测到的直线的最短长度(以像素点为单位).返回值就是(β; θ).β 的单位是像素,θ的单位是弧度.
-
opencv检测直线方法之形态学方法
在阅读文献中,偶然发现使用使用形态学方法也可以检测直线,故做实验并记录. 使用该方法,需要定义一个长度为L的结构元素element,其大小应足够大以保留图像中的字符笔划,然而又恰好能检测出图像中最短的表格线. 定义如下两个结构element用以检测图中水平.竖直的表格线: Mat element1 = getStructuringElement(MORPH_RECT, Size(70, 1));// size的width应大于图像中的横向笔划 Mat element3 = getStructur