Python Opencv实现单目标检测的示例代码
一 简介
目标检测即为在图像中找到自己感兴趣的部分,将其分割出来进行下一步操作,可避免背景的干扰。以下介绍几种基于opencv的单目标检测算法,算法总体思想先尽量将目标区域的像素值全置为1,背景区域全置为0,然后通过其它方法找到目标的外接矩形并分割,在此选择一张前景和背景相差较大的图片作为示例。

环境:python3.7 opencv4.4.0
二 背景前景分离
1 灰度+二值+形态学 轮廓特征和联通组件
根据图像前景和背景的差异进行二值化,例如有明显颜色差异的转换到HSV色彩空间进行分割。
1 原图

2 灰度化

3 二值化
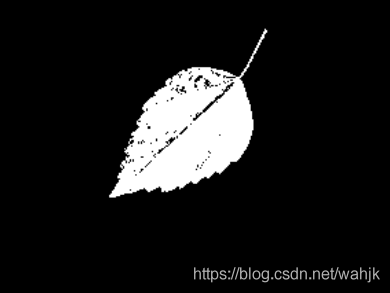
4 形态学处理

5 提取轮廓并找出目标外接矩形
代码封装:
def get_roi_contours(image_path, morph_size, num_morph):
'''
参数详解:
image_path:所需处理图片路径
morph_size:形态学处理核的大小
num_morph:进行形态学处理的次数
'''
image = cv2.imread(image_path, cv2.IMREAD_COLOR)
#灰度转换
gray_image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
#二值化
threhold, binary_image = cv2.threshold(gray_image, 0, 255, cv2.THRESH_BINARY_INV+cv2.THRESH_OTSU)
#形态学操作
kernel = cv2.getStructuringElement(shape=cv2.MORPH_RECT, ksize=morph_size)
morph_image = cv2.morphologyEx(binary_image, cv2.MORPH_CLOSE, kernel)
for i in range(num_morph-1):
morph_image = cv2.morphologyEx(morph_image, cv2.MORPH_CLOSE, kernel)
#查找轮廓
contours, hierarchy = cv2.findContours(morph_image, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
#选取轮廓面积最大的轮廓
area = 0
max_area_index = 0
for j in range(len(contours)):
if area < cv2.contourArea(contours[j]):
max_area_index = j
area = cv2.contourArea(contours[j])
rect = cv2.boundingRect(contours[max_area_index])
return rect
6 通过联通组件找到外接矩形
代码封装:
def get_roi_ConCom(image_path, morph_size, num_morph):
'''
参数详解:
image_path:所需处理图片路径
morph_size:形态学处理核的大小
num_morph:进行形态学处理的次数
'''
image = cv2.imread(image_path, cv2.IMREAD_COLOR)
#灰度转换
gray_image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
#二值化
threhold, binary_image = cv2.threshold(gray_image, 0, 255, cv2.THRESH_BINARY_INV+cv2.THRESH_OTSU)
#形态学操作
kernel = cv2.getStructuringElement(shape=cv2.MORPH_RECT, ksize=morph_size)
morph_image = cv2.morphologyEx(binary_image, cv2.MORPH_CLOSE, kernel)
for i in range(num_morph-1):
morph_image = cv2.morphologyEx(morph_image, cv2.MORPH_CLOSE, kernel)
#联通组件查询
numlabels, components_img, stats, centers = cv2.connectedComponentsWithStats(morph_image, 8)
#获取除背景外的所有联通组件
stats_without_back = stats[1:]
#获取除背景外的所有联通组件的面积最大值
max_area = np.max(stats_without_back, axis=0)[-1]
#获取面积最大联通组件的index
max_area_index = stats_without_back[:, -1]==max_area
rect = stats_without_back[max_area_index]
return np.squeeze(rect)[0:4]
2 Kmeans聚类实现前景和背景的分离
1 kmeans聚类后的图像,由于簇的中心是随机初始化的,所以目标的像素值可能为0,也可能为1,若采用opencv的findContours则要求前景像素值为1。

2 利用轮廓特征找外接矩形
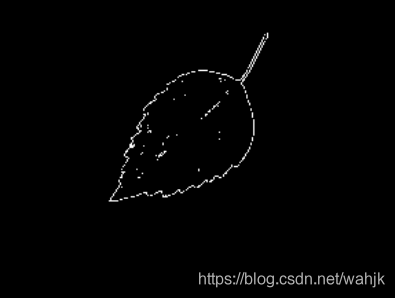
由于Kmeans随机初始化簇中心导致前景目标像素不确定,采用边缘提取的方法再查找轮廓。
边缘图:
代码封装:
def get_roi_Kmeans(image_path): image = cv2.imread(image_path, cv2.IMREAD_COLOR) image_data = image.reshape(-1, 3).astype(np.float32) #必须要转成浮点类型进行计算 #簇内平方和,标签和每个簇的中心 criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_COUNT, 10, 1) interia, label, centers = cv2.kmeans(image_data, 2, None, criteria, 5, cv2.KMEANS_RANDOM_CENTERS) #二值化,将标签为0的转换为255,即是目标 label[label==0] = 255 label[label==1] = 0 #转换数据类型,轮廓查找要是uint8类型数据 thresh_img = label.reshape(image.shape[0:2]).astype(np.uint8) x_grad = cv2.Sobel(thresh_img, cv2.CV_32F, 1, 0) y_grad = cv2.Sobel(thresh_img, cv2.CV_32F, 0, 1) x_grad = cv2.convertScaleAbs(x_grad) #ax + b 线性变换 y_grad = cv2.convertScaleAbs(y_grad) dst = cv2.add(x_grad, y_grad, dtype=cv2.CV_16S) #将两种sobel的加起来就可以得到整个边缘 dst = cv2.convertScaleAbs(dst) plt.imshow(dst, cmap='gray') #轮廓查找目标必须为1 contours, hierarchy = cv2.findContours(dst, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE) #获取外接矩形 rect = cv2.boundingRect(contours[0]) return rect
三 总结
单目标检测较为简单,只要合理利用目标和背景的差异便可将其分离出来。当然单目标检测的方法还有很多,比如有目标模板的时候可以采用模板匹配或者均值漂移,有足够的数据集时也可采用机器学习和深度学习方法。
到此这篇关于Python Opencv实现单目标检测的示例代码的文章就介绍到这了,更多相关Opencv 单目标检测内容请搜索我们以前的文章或继续浏览下面的相关文章希望大家以后多多支持我们!
相关推荐
-
python+opencv+caffe+摄像头做目标检测的实例代码
首先之前已经成功的使用Python做图像的目标检测,这回因为项目最终是需要用摄像头的, 所以实现摄像头获取图像,并且用Python调用CAFFE接口来实现目标识别 首先是摄像头请选择支持Linux万能驱动兼容V4L2的摄像头, 因为之前用学ARM的时候使用的Smart210,我已经确认我的摄像头是支持的, 我把摄像头插上之後自然就在 /dev 目录下看到多了一个video0的文件, 这个就是摄像头的设备文件了,所以我就没有额外处理驱动的部分 一.检测环境 再来在开始前因为之前按着国嵌的指导手册安
-

Python Opencv任意形状目标检测并绘制框图
opencv 进行任意形状目标识别,供大家参考,具体内容如下 工作中有一次需要在简单的图上进行目标识别,目标的形状不固定,并且存在一定程度上的噪声影响,但是噪声影响不确定.这是一个简单的事情,因为图像并不复杂,现在将代码公布如下: import cv2 def otsu_seg(img): ret_th, bin_img = cv2.threshold(img, 0, 255, cv2.THRESH_BINARY+cv2.THRESH_OTSU) return ret_th, bin_img d
-
Python 使用Opencv实现目标检测与识别的示例代码
在上章节讲述到图像特征检测与匹配 ,本章节是讲述目标检测与识别.后者是在前者的基础上进一步完善. 在本章中,我们使用HOG算法,HOG和SIFT.SURF同属一种类型的描述符.功能代码如下: import cv2 def is_inside(o, i): ox, oy, ow, oh = o ix, iy, iw, ih = i # 如果符合条件,返回True,否则返回False return ox > ix and oy > iy and ox + ow < ix + iw and o
-
OpenCV+python实现实时目标检测功能
环境安装 安装Anaconda,官网链接Anaconda 使用conda创建py3.6的虚拟环境,并激活使用 conda create -n py3.6 python=3.6 //创建 conda activate py3.6 //激活 3.安装依赖numpy和imutils //用镜像安装 pip install -i https://pypi.tuna.tsinghua.edu.cn/simple numpy pip install -i https://pypi.tuna.tsinghua
-
python opencv根据颜色进行目标检测的方法示例
颜色目标检测就是根据物体的颜色快速进行目标定位.使用cv2.inRange函数设定合适的阈值,即可以选出合适的目标. 建立项目colordetect.py,代码如下: #! /usr/bin/env python # -*- coding: utf-8 -*- import numpy as np import cv2 def colorDetect(): image = cv2.imread('./1.png') # 使用RGB颜色空间检测红 蓝 黄 灰,设置合适的阈值 boundaries
-
Python Opencv实现单目标检测的示例代码
一 简介 目标检测即为在图像中找到自己感兴趣的部分,将其分割出来进行下一步操作,可避免背景的干扰.以下介绍几种基于opencv的单目标检测算法,算法总体思想先尽量将目标区域的像素值全置为1,背景区域全置为0,然后通过其它方法找到目标的外接矩形并分割,在此选择一张前景和背景相差较大的图片作为示例. 环境:python3.7 opencv4.4.0 二 背景前景分离 1 灰度+二值+形态学 轮廓特征和联通组件 根据图像前景和背景的差异进行二值化,例如有明显颜色差异的转换到HSV色彩空间进行分割. 1
-
Python+OpenCV实现分水岭分割算法的示例代码
目录 前言 1.使用分水岭算法进行分割 2.Watershed与random walker分割对比 前言 分水岭算法是用于分割的经典算法,在提取图像中粘连或重叠的对象时特别有用,例如下图中的硬币. 使用传统的图像处理方法,如阈值和轮廓检测,我们将无法从图像中提取每一个硬币,但通过利用分水岭算法,我们能够检测和提取每一个硬币. 在使用分水岭算法时,我们必须从用户定义的标记开始.这些标记可以通过点击手动定义,或者我们可以使用阈值和/或形态学操作等方法自动或启发式定义它们. 基于这些标记,分水岭算法将
-
python opencv实现gif图片分解的示例代码
案例:将和当前脚本同目录下的gif图片分解成png图片,并将分解后的图片保存到pics目录下,将其从0开始命名. GIF 动图的分解可以利用 PIL模块的Image类来实现. from PIL import Image import os """ 将一张GIF动图分解到指定文件夹 src_path:要分解的gif的路径 dest_path:保存后的gif路径 """ def gifSplit(src_path, dest_path, suffix
-
Python Flask搭建yolov3目标检测系统详解流程
[人工智能项目]Python Flask搭建yolov3目标检测系统 后端代码 from flask import Flask, request, jsonify from PIL import Image import numpy as np import base64 import io import os from backend.tf_inference import load_model, inference os.environ['CUDA_VISIBLE_DEVICES'] = '
-
Python OpenCV读取显示视频的方法示例
目标 学习读取视频,显示视频和保存视频. 学习从相机捕捉并显示它. 你将学习以下功能:cv.VideoCapture(),cv.VideoWriter() 从相机中读取视频 通常情况下,我们必须用摄像机捕捉实时画面.提供了一个非常简单的界面.让我们从摄像头捕捉一段视频(我使用的是我笔记本电脑内置的网络摄像头) ,将其转换成灰度视频并显示出来.只是一个简单的任务开始. 要捕获视频,你需要创建一个 VideoCapture 对象.它的参数可以是设备索引或视频文件的名称.设备索引就是指定哪个摄像头的数
-
python+opencv3.4.0 实现HOG+SVM行人检测的示例代码
参照opencv官网例程写了一个基于python的行人检测程序,实现了和自带检测器基本一致的检测效果. 网址 :https://docs.opencv.org/3.4.0/d5/d77/train_HOG_8cpp-example.html opencv版本:3.4.0 训练集和opencv官方用了同一个,可以从http://pascal.inrialpes.fr/data/human/下载,在网页的最下方"here(970MB处)",用迅雷下载比较快(500kB/s).训练集文件比较
-
树莓派上利用python+opencv+dlib实现嘴唇检测的实现
目录 1.安装相关库文件 2.代码部分 3.实验效果 树莓派上利用python+opencv+dlib实现嘴唇检测 项目的目标是在树莓派上运行python代码以实现嘴唇检测,本来以为树莓派的硬件是可以流畅运行实时检测的,但是实验的效果表明树莓派实时检测是不可行,后面还需要改进. 实验的效果如下: 1.安装相关库文件 这里需要用的库有opencv,numpy,dlib. 1.1 安装opencv pip3 install opencv-python 1.2 安装numpy 树莓派中自带了numpy
-
OpenCV实现物体的凸包检测的示例代码
目录 1. 凸包 2.寻找凸包:convexHull()函数 3.函数解析之theRNG() 4 .circle()函数[回忆] 5.基础示例程序:凸包检测基础 1. 凸包 什么是凸包? 解释:给定二维平面上的点集,凸包就是将最外层的点连接起来构成的凸边形,它是包含点集中所有的点. 如下:用人手图来举例说明凸缺陷概念.手周围深色的线描画出凸包,A到H被标出的区域是凸包的各个“缺陷”,这些凸度缺陷提供了手以及手状态的特征表现的方法. 2.寻找凸包:convexHull()函数 说明:convexH